- · 《分析测试技术与仪器》[10/06]
- · 《分析测试技术与仪器》[10/06]
- · 《分析测试技术与仪器》[10/06]
- · 《分析测试技术与仪器》[10/06]
- · 《分析测试技术与仪器》[10/06]
车道线检测技术分析
作者:网站采编关键词:
摘要:针对车道线检测的任务,我们需要弄清楚几个问题: 1.车道线的表示形式? 输出类型:掩码/点集/矢量线条 实例化:每个车道线是否形成实例 分类:是否对车道线进行了分类(单白、
针对车道线检测的任务,我们需要弄清楚几个问题:
1.车道线的表示形式?
输出类型:掩码/点集/矢量线条实例化:每个车道线是否形成实例分类:是否对车道线进行了分类(单白、双黄等)提前定义的参数:是否只能检测固定数量的车道线车道标记:是否对车道上的行车标记也做了检测这会影响到数据的标注和网络的输出形式,而且最终需要的是车道线在世界坐标系下的方程。而神经网络更适合提取图像层面的特征,直接回归方程参数有较多限制。所以,网络推理输出后需要相对复杂的后处理去解决真实坐标的问题。
2.神经网络推理到哪一步?
图像分割方案倾向于像素点的分类,该像素点是否属于车道线标识并对标识类别进行判断;图像检测方案倾向于抽象出分割边界线,在设定的一系列anchor中判断是否存在车道线,以及回归车道线的位置参数。逐像素的车道线标识本身 or 表征出抽象的车道分隔边界线。
数据集
需要各场景类别的数据平衡,比如高速公路,辅路,盘山路,夜晚,雨天等数据检查筛选出质量较好的图片,比如高速公路夜间的数据和雨中驾驶的视频较为模糊相近的图片抽帧标注,可以每10张抽取1张,比如低速的多张图片相似会造成准确率虚高增广小类别的图片,比如查看车道线系数直方图,再小幅度旋转使每个系数分布更为合理缩放并归一化数据,加速收敛开源车道线数据集包括:
Caltech:一共约1.2k张图片,场景比较简单,且视角较好;图片大小:640x480,如下图

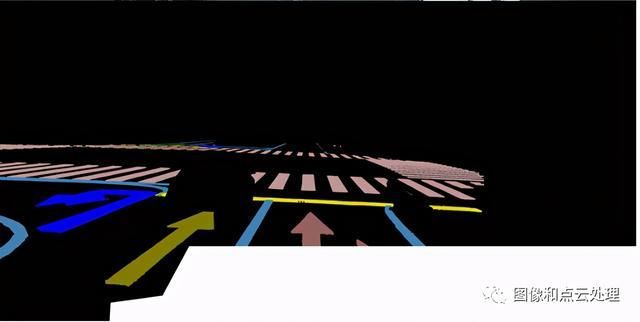
VPGNet:一共20k张图片,包含白天(非雨天、雨天、大雨天)、夜晚的数据,同时包含了各种车道线类型,以及其他不同类型的车道标识(左转箭头、直行箭头、斑马线等等),如下图

TuSimple:一共72k张图片,位于高速路,天气晴朗,车道线清晰,特点是车道线以点来标注;图片大小:1280x720,如下图

CULane:一共98k张图片,包含拥挤,黑夜,无线,暗影等八种难以检测的情况,最多标记4条车道线;图片大小:1640x590,如下图

BDD100k:120M张图片, 包含美国4个区的白天、黑夜各种天气状况,二维8类别车道线;图片大小:1280x720,如下图

ApolloScape:140k张图片,特点是车道线以掩码的形式标注,包含2维或3维28个类别;图片大小:3384x2710,如下图
CurveLanes:华为弯道检测数据集 135k张图片, 采用三次样条曲线手动标注所有车道线,包括很多较为复杂的场景,如S路、Y车道,还有夜间和多车道的场景。分为训练集10万张,验证集2万张,测试集3万张;图片大小:2650x1440,如下图

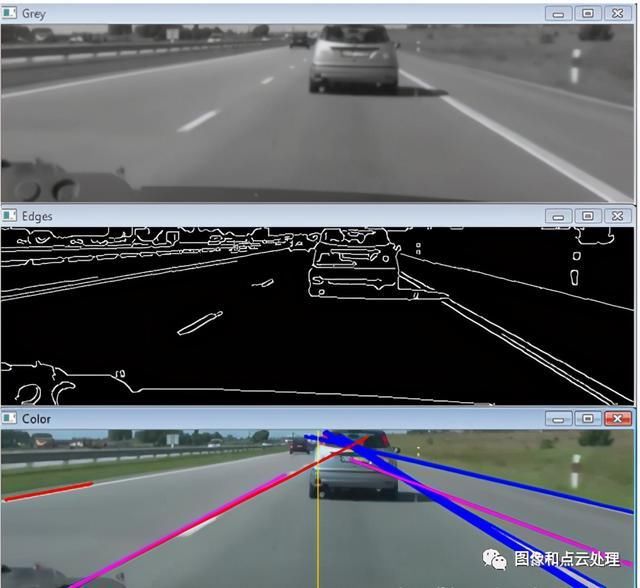
传统图像方法
通过边缘检测滤波等方式分割出车道线区域,然后结合霍夫变换、RANSAC等算法进行车道线检测。这类算法需要人工手动去调滤波算子,根据算法所针对的街道场景特点手动调节参数,工作量大且鲁棒性较差,当行车环境出现明显变化时,车道线的检测效果不佳。主流方式如下:
基于霍夫变换的车道线检测;基于LSD直线的车道线检测基于俯视图变换的车道线检测;基于拟合的车道线检测;基于平行透视灭点的车道线检测;难点
应用场景受限;霍夫直线检测方法准确但不能做弯道检测,拟合方法可以检测弯道但不稳定,仿射变换可以做多车道检测但在遮挡等情况下干扰严重。透视变换操作会对相机有一些具体的要求,在变换前需要调正图像,而且摄像机的安装和道路本身的倾斜都会影响变换效果。
深度学习方法
车道线检测的应用场景具有时序信息特性,为了利用时序特征通常会引入RNN模块,加上Encoder-Decoder的形式已经成为CNN特征提取的标配,所以一般的做法是对Encoder提取的Features进行进一步加工,提取连续帧带来的历史信息。或者借助一些额外的相关业务更好的引导车道线的回归。主流深度学习的车道线检测方法:包括二值语义分割产生掩码图部分和掩码图的线拟合部分。
文章来源:《分析测试技术与仪器》 网址: http://www.fxcsjsyyq.cn/zonghexinwen/2021/0303/499.html